

Flying for hours across the country in a helicopter can mean sitting in one position without being able to take hands and feet off the controls. By the end of the day, I practically flop out of the pilot seat! Oh, I wish my helicopter had a hands-off autopilot, and that leads to the question: “Are there any helicopters that have autopilots?”
Most large helicopters come equipped with automatic flight control systems to fly and navigate the aircraft automatically. Smaller, less complex automatic flight stabilization systems can be installed in smaller helicopters if space, weight, power, and budget allow.
A helicopter is a very complex aircraft to fly and because of the aerodynamics involved they are known as ‘Dynamically Unstable’. What this means is that when a pilot takes their hands off the cyclic (main control for pitch and roll), the helicopter will want to pitch and roll by itself, placing the helicopter into dangerous flight conditions.
To have an autopilot that can overcome this instability, fly the aircraft, monitor it, and navigate requires a very, very complex set of avionics, sensors, and flight control actuators. As you can imagine this is not cheap or lightweight!
Let’s take a look at all you need to know about helicopter autopilots…
Can Helicopters Have An Autopilot?
The systems required to allow an autopilot to be used in a helicopter are complex, take up quite a bit of room, and are very expensive. Because of this, helicopters of 4 seats or more are the only ones that usually qualify for having an autopilot system installed.
There are different levels of autopilot complexity and capability and the size of the helicopter and its primary usage will dictate what level of autopilot system will be installed when requested by the owner.

Source: Raymond Wambsgans
The most basic autopilot systems will give basic flight stabilization, hold a set altitude and heading and provide the pilot visual routing and approach guidance on a primary flight display (PFD) in the cockpit if coupled to a suitable GPS.
A great example of this is the Genesys Aerosystems HeliSAS Autopilot system fitted in the Robinson R44 & R66 helicopters. With an Aspen 1000H Primary Flight Display, this system can be installed for around $60,000.
When helicopters require more features and capability from an autopilot system they become integrated into very complex, whole-helicopter avionic systems that are very expensive, but they allow helicopters to be flown very precisely with very little pilot interaction.
These kinds of systems you will find in the majority of twin-engine helicopters like the Airbus H135 all the way up to the Sikorsky S92.

Although an autopilot system would be welcomed by many pilots, no matter the size of the helicopter, they are really only suited to helicopters that are large enough, powerful enough, and have digital avionics systems.
When Are Helicopter Autopilots Used?
Helicopter autopilot systems really shine when the flight path of the helicopter can be taken care of to allow the pilot/s to concentrate on other tasks like:
- Flying IFR in the clouds or at night
- Long-distance flights to alleviate pilot fatigue
- Provide smoother, accurate flight paths
- Allow pilots to alter navigation or communication settings
- Allow for stabilized departure and approach profiles in poor weather
- Maintain accurate route tracking for increased time and fuel management
- Maintain accurate positioning when flying in very busy airspace
Flying long distances, IFR, and at night are the main uses for using an autopilot on a helicopter. By allowing the helicopter to do the flying, it allows the pilot more mental capacity to monitor the flight and prepare and configure the helicopter for the next phase of the flight.
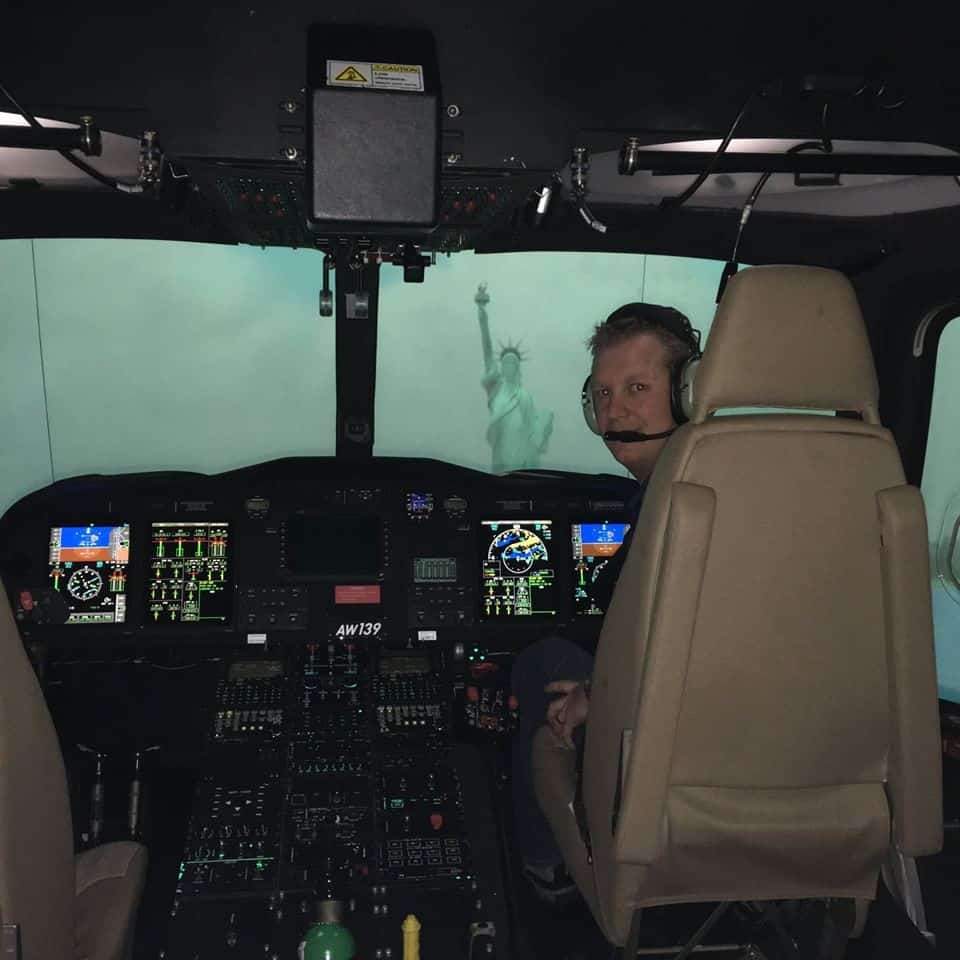
To give you some idea of what a complex helicopter autopilot system can do here is an example:
The pilot can lift the helicopter into a hover and begin to take off down a runway. At around 40-60kts (model dependent), the pilot can press a button and the helicopter autopilot system will take over. It will then automatically climb up to the requested altitude that was set by the pilot, it will accelerate to the requested speed, set by the pilot, and fly a complete routing as programmed into the GPS by the pilot only with a couple of button pushes!
When the pilot is ready for the approach and landing, they will input the instrument approach procedure into the navigation system, the autopilot will pick up the instrument approach, turn the helicopter onto it and begin the approach down to the runway.
With another click of a button, the helicopter will begin to automatically level off at 150ft above the ground and slow down so it flies at 60kts & 50ft over the runway. With another button press, it will automatically come into a hover and by pressing the thumbstick on the collective control the helicopter will land. No pilot control is needed on the controls!
Pretty impressive stuff!!

Many years ago I heard a rumor that some pilots flying out to the offshore oil and gas platforms in the North Sea were having an unofficial competition to see who could do a specific trip with the least amount of time with hands on the controls.
From wheels up to wheels down the record was something around the 20-30 second mark for the entire flight!
Are There Different Types Of Autopilot Systems?
There are three basic forms of autopilot systems that can be installed in a helicopter:
- SAS – Stability Augmentation System
- ATT – Attitude Retention System
- CPL – Coupled System
SAS
The SAS type of system is the most basic. In its simplest form, SAS is a stabilization-only system. The pilot is still required to hand fly the helicopter but the system will help to smooth out the pilot or weather-induced oscillations.
The SAS system uses basic sensors and electronic processing to monitor the aircraft’s attitude and the speed at which the attitude changes. It then sends electrical signals to actuators (integrated electric motor & gears) to move the flight controls to help dampen and smooth out the flight path.
SAS will not provide any auto-flight capability or visual navigation guidance to the pilot.
This type of system will be fitted to the smallest helicopters, usually consisting of 4 seats or more, and controls the pitch and roll axis.
Join My Newsletter & Get Great Tips, Information and Experiences To Help You Become a Superb Pilot!
ATT
Attitude Retention is a system that keeps the helicopter in its current flight state when activated. It also controls the pitch and roll axis of the helicopter.
If it is activated in straight and level flight it will keep the aircraft there. If it is activated during a 10° right-hand turn it will keep the helicopter in a 10° right-hand turn. If wind or turbulence try and move the helicopter away from the set flight regime it will move the helicopter back to it.
This is a hands-off type of flight control system but it also allows for simple overriding control by the pilot. Pilots can change the current flight condition by either:
- Pushing against the flight controls to set a new regime then letting go and the helicopter will return to its current state of flight albeit on a new heading or altitude, or
- Moving a ‘Trim’ button on the cyclic to set a new heading or pitch attitude, or
- The pilot can press a button on the cyclic which deactivates the ‘Force Trim’ holding system, adjust the aircraft s flight attitude, then release the Force Trim button to now set the new flight regime for the ATT system to maintain
This type of system was the earliest form of a helicopter autopilot. It allows for hands-off flying but has no auto navigation display guidance or flight control commanding. More complex autopilot systems use this ATT system as their foundation on which to build the fully coupled auto flight systems.

CPL
This is the system that many people think about when they hear ‘Autopilot’. It is the most advanced autopilot system and contains many parts to allow fully autonomous flight once configured and activated.
A Coupled autopilot system will take in information from many sensors and provide visual navigation guidance to the pilots who can either fly the aircraft manually following the visual guidance cues on instruments or digital fight displays or when activated, the autopilot system will autonomously fly the aircraft ‘coupled’ to the same navigation guidance.
A coupled system comprises of two main parts:
- Autopilots – Provides the aircraft stability (mentioned above)
- Flight Director – Provides navigation guidance
Within the Flight Director are many systems that allow for fully automatic flight:
- Sensors
- Pilot Selection & Activation Controls
- Central Processing Unit/s
- Flight Control Actuation
These systems work together and are commonly referred to as the AFCS – Automatic Flight Control System. In the next section, I will try and describe how one of these complex systems works to provide fully automated flight.
How Do Helicopter Autopilots Work?
When you are requiring a helicopter to have a fully coupled autopilot system you are going to need deep pockets as the systems I am about to go through are not cheap, especially when it comes to aviation! I swear manufacturers add on an extra zero the second it mentions anything aviation related!
For a full AFCS auto flight system to work seamlessly it will need the following:
Sensors
Sensors are placed all over the aircraft to gather information and send it to the central AFCS electronic processing unit/s. These sensors are used to monitor things like airspeed, altitude, GPS position, flight control positions, electric actuator positions, rate of climb, bank angle, and hundreds of other parameters.
These sensors give the central processing unit its data to know where the aircraft is and what everything onboard it is doing. These are like the senses we all have – sight, smell, taste, hearing, balance, touch etc.
Without this information, the AFCS would not know where the aircraft is to do be able to do anything with it.
Pilot Commands
The AFCS will do nothing unless it is activated and told what to do by the pilot/s. The way this is done is by having a series of buttons and numerical selector knobs in the cockpit.
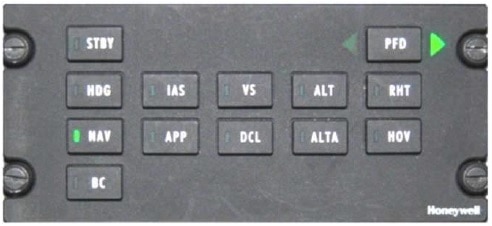
These Guidance Controls Panels allow the pilots to activate the auto flight system called the Flight Director when required and to also tell it which flight parameters the pilots wish to be automatically controlled.
The most common flight parameters used by the pilots are:
HDG – Heading: When pressed, this is used to fly the helicopter on a set heading. Mainly used when receiving vectors from air traffic control. The pilot selects the required heading via a selector knob and the helicopter will do a Standard Rate Turn (3° Per Second) and roll out on the requested heading.
NAV – Navigation: This is pressed when the pilot wants the aircraft to automatically fly the planned routing via GPS waypoints, navigation beacons or published airport departure procedures. The routing is entered using an MCDU – Multifunction Control Display Unit.
ALTA – Altitude Aquire: When pressed, this is used to climb or descend the helicopter to a set altitude. The system will set the helicopter in a climb for instance and automatically level off to the altitude set using a numerical selector knob.
ALT – Altitude Hold: When pressed, this is used to maintain the current altitude of the aircraft. Once ‘ALTA’ has captured and leveled off it will switch to ALT mode. This is mainly used when in cruise and different altimeter settings are received from ATC or weather reports. The helicopter will auto-adjust its height to maintain the pilot selected barometric altitude.
APP – Approach Mode: When flying into an airport using a published instrument approach procedure the pilot can select APP mode to allow the helicopter to acquire the approach flight path and automatically fly the helicopter down to the runway via the published routing.
IAS – Indicated Airspeed Mode: When pressed, this will accelerate or decelerate the helicopter to the required airspeed set by the pilots. This is done using a selector knob/button to set the target speed and when the value is changed, the helicopter will automatically alter the speed to meet the desired setpoint
There are many other functions, but for this article, the pilot will generally want the aircraft to fly under NAV, ALT & IAS. Then when flying around an airport ALTA, NAV, APP & HDG are commonly used.
FMS – Flight Management System
The Flight management system is exactly what it sounds like. It manages the flight parameters requested by the pilots and is part of the Central Electronic Processing Unit.
Within the FMS there are usually two independent autopilot systems to act as redundancy. The first one activated will become the master, and the second one will be the slave. They work together as a pair but if one autopilot fails, the other will automatically take over to 100%.
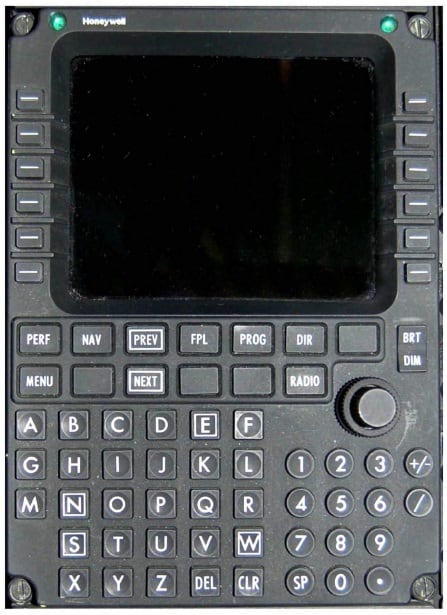
One of the primary parts of the FMS is the MCDU – Multifunction Control Display Unit.
This unit is where the pilots can input and select all the required navigation routing waypoints, published departure, and approach procedures stored in its database. The selected routings will be engaged and flown when the ‘NAV’ button is engaged on the Guidance Controller and the aircraft reaches each point on that journey.
There are usually two of these in the cockpit, one for each pilot although they are synced so any changes made on one show on the other.
Central Electronic Processing Unit
This is the brain of the automatic flight system. It takes in all the data from the sensors, FMS & cockpit buttons and processes it using complex software code and algorithms to issue digital commands to the pilots’ flight displays and electric actuators that move the flight controls.
As the commands are issued to the electric actuators it constantly monitors the data coming back from the sensors to ensure the aircraft is doing what it has told it to do and it automatically makes any changes required.
Just like most things in a complex helicopter, there are two of them that work together as a pair but if one fails the other automatically takes over to ensure control is not lost.
On the Leonardo AW139 these central electronic Processing units are called MAU1 & MAU2 (Modular Avionics Units) and are mounted in the nose of the helicopter. They are working on their own, monitoring the other to ensure the operation and syncing data between one another to ensure a seamless transition if one fails.
Electrical Actuators
The electrical actuators do the physical moving of the flight controls that the auto flight system requests. They turn the digital signals sent from the Central Processing Unit to operate motors and gears, called actuators, to move a shaft up and down or rotate it back and forth.
Most actuators used on a helicopter are linear and ‘Dual Type’ meaning that there are two actuators joined together in one unit and each independent autopilot system controls one part of the actuator at 50%. If a failure occurs in one of the autopilots, the second autopilot will begin moving the actuator at 100% to account for the other failed system.
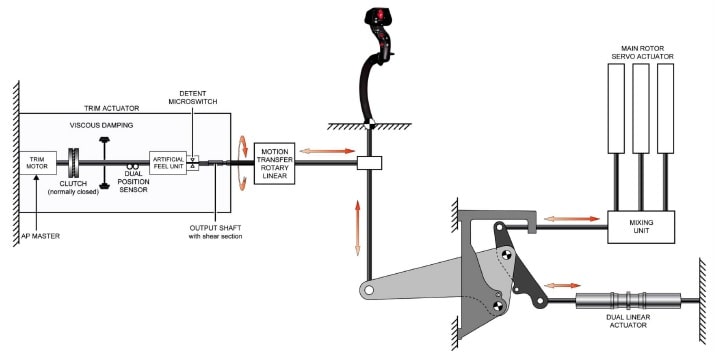
Above, you can see that the pilot can move the Main Rotor Servo control rods via the Cyclic, and the Dual Linear Actuators can also move the main control rods via the connecting bellcranks.
This allows either the pilot or the automatic flight control system (AFCS) to control the helicopter, but it also means the pilot can override the automatic system at any time just by grabbing the controls.
The automatic flight control system works by having a Dual Linear Actuator connected to every control rod that goes to a flight control hydraulic servo on the AW139:
- One for Pitch
- One for Roll
- One for Yaw
By issuing commands to the dual linear actuators, the helicopter can be controlled on each axis. This is a 4 axis AFCS system. The fourth axis is height. This is when the Collective control is raised and lowered by the pilot or AFCS, both the Pitch and Roll actuators operate to command the hydraulic flight control servos to raise/lower the swashplate ‘collectively’.

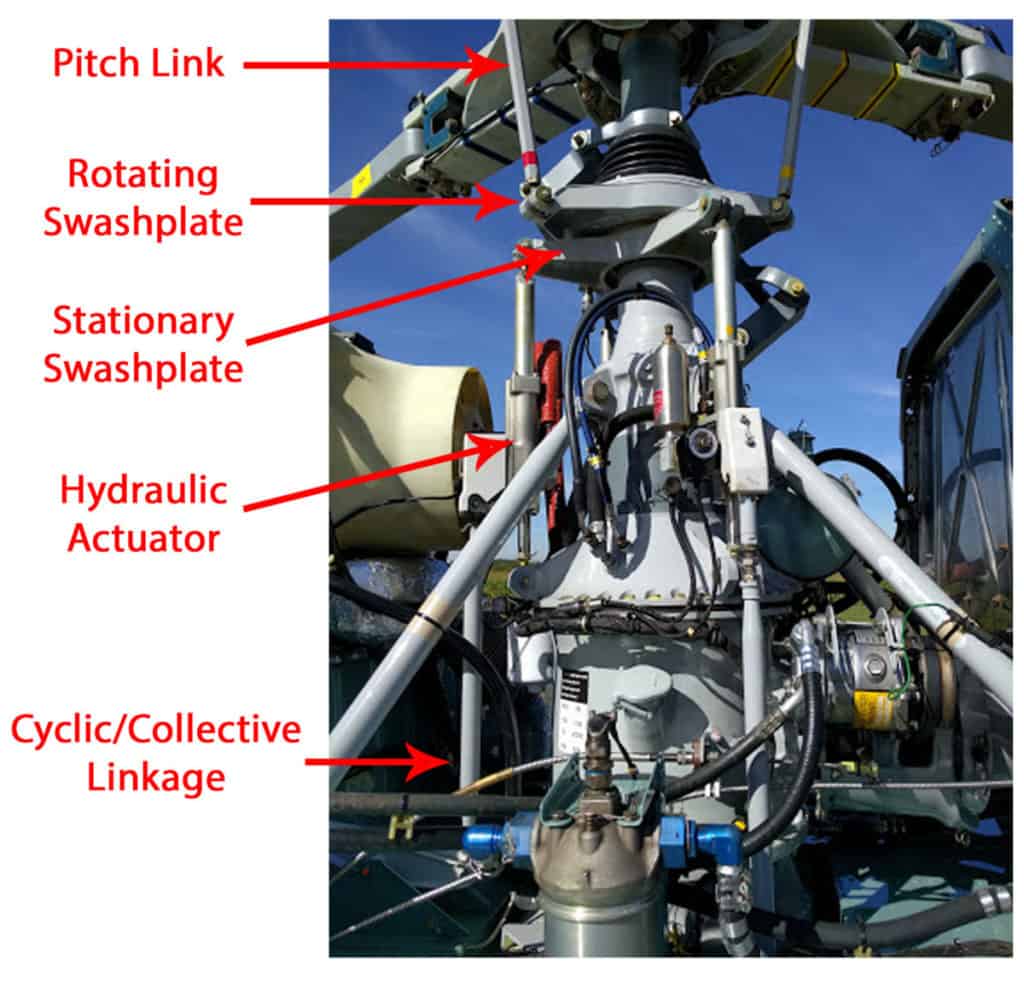
Flight Control Servos
These are the muscles of the helicopter! Hydraulic servos are what connect to the swashplate and slider of the main and tail rotors to change the pitch of the rotor blades.
This is like the power steering of your car. Larger helicopters require huge amounts of force to overcome the aerodynamic loads placed on the rotor blades and the only way to control the helicopter is to use hydraulic servos.
The Sikorsky S92 has a dual hydraulics system pressurized to 4000 psi / 275 bar!
The push/pull flight control tubes that are linked to the pilot’s Cyclic, Collective & Pedals move pilot valves in the hydraulic system that tell the high-pressure hydraulic servos how to move.
Most helicopters have 3 hydraulic servos to move the main rotor swashplate and the larger helicopters usually have 6 – each servo doubled up for redundancy running off two separate hydraulic pressure systems.
The AFCS system is connected in line with the push/pull tubes to move the pilot valves in the hydraulic servos. No matter if it’s the pilot or the AFCS actuators moving the push-pull/tube, the hydraulic servo knows no different. Whenever the control tube moves the pilot valve, the hydraulic servo moves and alters the pitch of the rotor blades.
This is how the AFCS is able to control the helicopter to guide it when coupled to the Flight Director.
To Finish
Helicopters can be fitted with autopilot systems providing there is enough spare weight, space, and budget to install a system. There are many types of autopilot systems on the market and having an autopilot in the helicopter really can reduce the pilots’ workload to allow much safer flight, especially when flying IFR and at night, even more so if it is a single-pilot operation.
Having flown helicopters with AFCS and ones without, they both have their pros and cons, but I know that when I fly long-distance flights or the weather is getting worse, the option to activate the autopilot systems would be very welcomed!
Further Reading
If you found this article interesting and would like to keep reading, I highly recommend the following articles from my blog:
- How Do Helicopter Engines Work? Your Ultimate Guide
- How Do Helicopter Controls Work? Pilot Tells All!
- How Do Helicopters Turn? Easy Yet Complex!
- How Much Can a Helicopter Lift? 20 Helicopters Compared!
- How High Can You Go In a Helicopter? Can You Land On Mount Everest?
