

Hovering a helicopter is what gives this machine its unique edge but why do we all see videos of students unable to keep the thing in a stable hover. I can tell you that learning to hover a helicopter is a very tough thing to do so why do helicopters not have an auto hover capability?
Helicopters with Auto Hover Capability:
- Bell 412
- Bell 525
- S76D
- S70i
- S92
- AW101
- AW139
- AW189
- EC225
- EC725
- NH90
To have a helicopter that is capable of auto hovering requires a digital flight control system, hydraulic actuators to move the flight controls, and an advanced avionics package installed. However, there have been auto hover systems around in helicopters since the 1960s.
Read on to find out more…
What Helicopters Can Auto Hover?
Hovering a helicopter is a very hard task to learn and even then, to remain in a stable hover for long periods of time takes a lot of practice and skill. The main reasons why auto hover capabilities are not installed in every helicopter comes down to two main reasons:
- COST – For a helicopter to hover by itself it needs in essence a power steering system on all the flight controls, a complex series of sensors to attain its position in space & monitor its movements, and a digital control system to put all these systems together and operate them accordingly.
Systems like this are not cheap and to fit them into a helicopter that costs under $1M would pretty much double the cost of the helicopter putting it out of reach for the manufacturer’s target market. - WEIGHT – Adding these systems add weight and extra weight to the small, single-engine helicopters would make them unusable for anyone trying to fly them.
The only variable the manufacturer could offload to make room for the auto hover capability is fuel and losing 50% fuel capacity would make a helicopter pointless.
For most helicopters that have an auto hover capability, they are designed for many roles and two of the most common roles are for Search & Rescue and Naval applications.
The helicopters themselves will have at least 2 engines, be large to carry lots of equipment, passengers, and or cargo, and have sophisticated digital avionic systems where an auto hover capability is just one small part of the entire helicopter.
Here are some helicopters with auto-hover capabilities:








How Do Helicopter Auto Hover Systems Work?
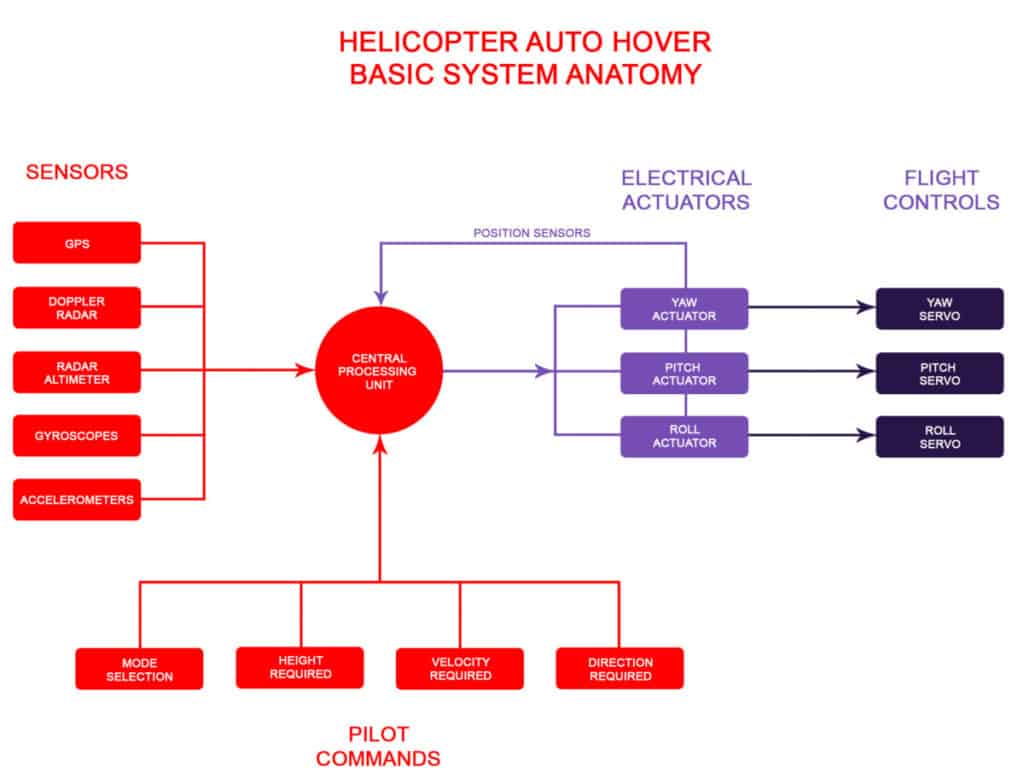
For a helicopter to be able to auto hover it needs to be equipped with several different systems that work together to keep the helicopter in one position. These systems are:
- Sensors
- An AFCS (Automatic Flight Control System) that comprises of:
- An Autopilot
- Linear/Rotary Actuators
I’m going to try and break this down as easily as I can because this is some serious technology with a lot of parts that make it all work – Bear with me!
Sensors
For a helicopter to be able to hover on its own it needs data to process. The system first needs to know where the helicopter is in space in relation to the ground or the target selected (Stricken vessel etc). Then it needs to know its current state of flight – Is it in forward flight, sideways flight, descending, banking?
Once it knows its position and flight state it then needs to get feedback data from when it begins to control the helicopter. How far does it need to move a flight control? When to stop the movement? Has the movement taken it too far? How fast to make the movement?
When the helicopter gets in position it then needs to constantly evaluate its current position and compute if it needs to make a change to keep it at its desired position. Wind gusts or a moving vessel for instance will constantly change it.
The main types of sensors used in an auto-hover system are:
- GPS – This gives the helicopter its lateral position over the ground/ocean
- Radar Altimeter – This gives the helicopter its height over the ground/ocean
- Gyroscopes – These give the helicopter its pitch, roll & yaw data
- Doppler Radar – Uses Doppler Effect (Wiki Link) to measure aircraft distance from a specific object – Similar to a Police Speed Trap
- Linear & Rotary Position Sensors – These tell the Central Processing Unit where the control actuators are in their freedom of travel
- Accelerometers – These give the Central Processing Unit data on how fast the aircraft is moving in any axis.
Depending on the helicopter, they can use all or some of these sensors depending on the sophistication of the system installed. All of these sensors are constantly feeding data into the Central Processing Unit which then uses this data to decide how to control the helicopter.
Join My Newsletter & Get Great Tips, Information and Experiences To Help You Become a Superb Pilot!
Pilot Commands
Pilots also need to input data into the Central Processing Unit for it to work. The system I’ve flown on the Leonardo AW139 is very simple to operate and I imagine other helicopters follow a similar operation.
The data inputs the system needs from the pilots are the following:
- Mode Selection – This is used to activate the Auto Hover function. It can be activated by pressing the ‘HOV’ button on the Flight Director Panel or by pressing the Thumbstick Button on either the pilot or co-pilot Cyclic.
To be able to select Auto Hover the aircraft must be in the following flight conditions:- Less Than 75 Knots Indicated Airspeed
- Less Than 60 Knots Forward Ground Speed
- Less Than 40 Knots Sideways Ground Speed
- Between 30ft and 2000ft Radar Altimeter Height

Once the pilot selects the Auto Hover Function the helicopter will immediately begin to transition to a Hover at 50ft above the surface with zero velocity in all directions. If a pilot wishes to change these parameters they need to give the Central Processing Unit some additional data.
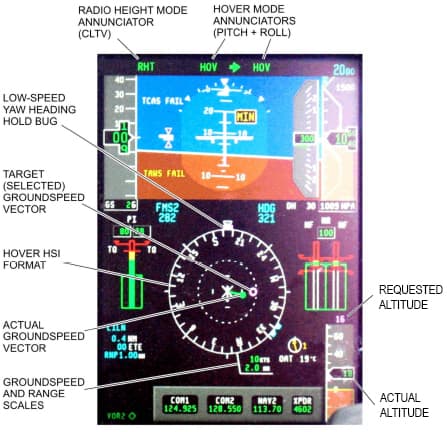
- Height Required – This can be selected by the pilot to request the Auto Hover to place the helicopter at a set height above the surface. This is easily accomplished by adjusting the Radar Altimeter height using a Thumbstick on the Collective Control. It selects 1 foot increments with each up/down press and you can see the data towards the bottom right of the screen.
- Velocity Required – Sometimes a helicopter needs to hold a hover but while moving. For Instance when winching a patient of a moving vessel. This is when a Doppler Radar system comes into play. The pilot can select the vessel and the Auto Hover system will match the helicopter speed to that of the moving vessel while trying to maintain a constant height above it.
This can be a difficult task, especially in high sea states and depending on the wind. The sophistication of the system will dictate how well the system is able to maintain its position. - Direction Required – When the HOV mode is engaged a small magenta circle will appear in the Primary Flight Display’s compass Rose. This is the Target Position the pilot wishes the helicopter to be in at a stabilized hover.
The pilot can move the position of this target marker using the Thumbstick on the Cyclic control. As the system sees there is a change from its current position, it displays a green line with a dot to show the pilots its intended flight path and velocity to get to the requested position. The longer the green line, the faster the helicopter will travel to get there.
Central Processing Unit
This is where the magic happens for the whole helicopter! This Auto Hover function is just a small function on the helicopter avionics suite. Many helicopter manufacturers use an aviation avionics supplier to build and integrate a full avionics suite for a new helicopter design.
When Agusta, now Leonardo developed the AW139 they went to Honeywell to supply them with the avionics package and it’s immense!

When further capabilities are required for the helicopter, for instance when it is being fitted out at production to be a dedicated Search & Rescue helicopter then additional equipment like the Doppler Radar system for instance, will be integrated into the Primus Epic to allow communication back and forth.
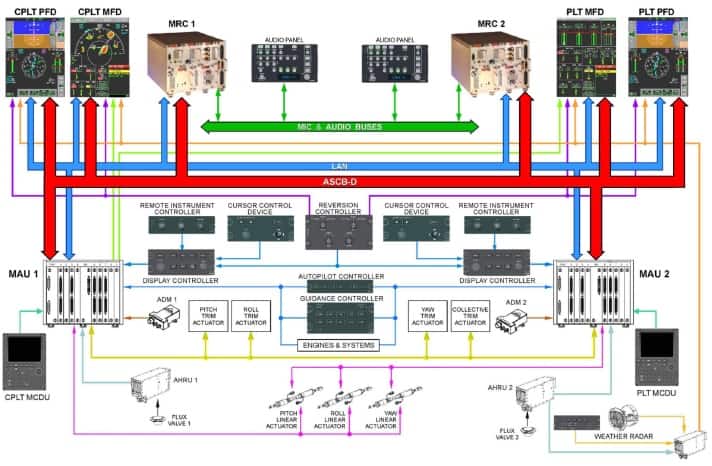
For the Auto System to function the MAU’s (Modular Avionics Units) will receive all the data from the sensors and pilot input stations and compute what the helicopter is required to do.
From there it will issue digital commands to electrical actuators that are connected to the flight control system. The actuators can be of a linear or rotary type and will move the control rods using internal motors and gears.
The control rods then go to the hydraulic servos which will move the helicopter’s control surfaces along with digital controls to the engine to request more/less power to accompany the flight control movements.
Electrical Actuators
The electrical actuators do the physical moving that the auto hover system requests. They turn the digital signals sent from the Central Processing Unit to operate motors and gears to move a shaft up and down or rotate it back and forth.
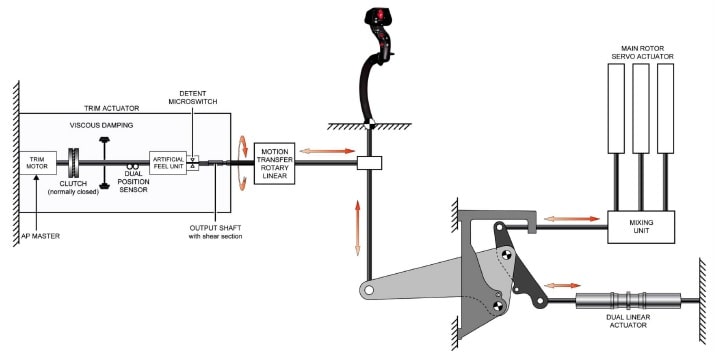
Most linear actuators used on aircraft are ‘Dual Type’ meaning that there are two actuators joined together and two independent control systems working together at the same time to ensure redundancy. Above you can see that the pilot can move the Main Rotor Servo control rods via the Cyclic, and the Dual Linear Actuators can also move the main control rods via the connecting bellcranks.
This allows either the pilot or the automatic flight control system (AFCS) to control the helicopter, but it also means the pilot can override the automatic system at any time just by grabbing the controls.
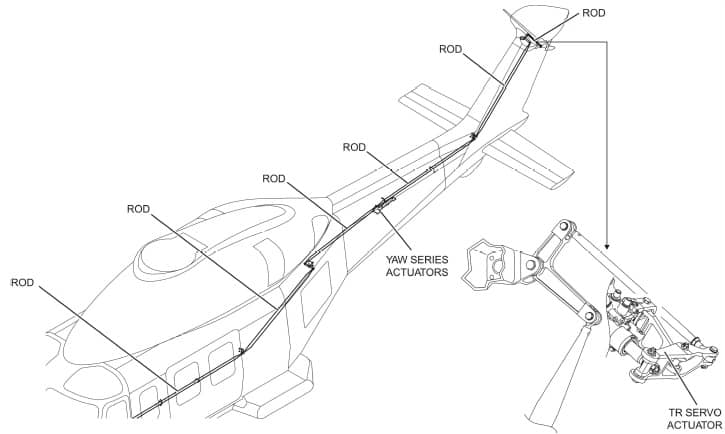
The flight control system works by having a Dual Linear Actuator connected to every control rod that goes to a flight control hydraulic servos on the AW139:
- One for Pitch
- One for Roll
- One for Yaw
By issuing commands to the actuators, the helicopter can be controlled on each axis. This is a 4 axis AFCS system. The fourth axis is height. This is when the Collective control is raised and lowered and both the Pitch and Roll actuators operate to raise/lower the swashplate ‘collectively’.
If you would like more information about what each flight control does on a helicopter, please check out my article here:
How Do Helicopter Controls Work? Pilot Tells All!
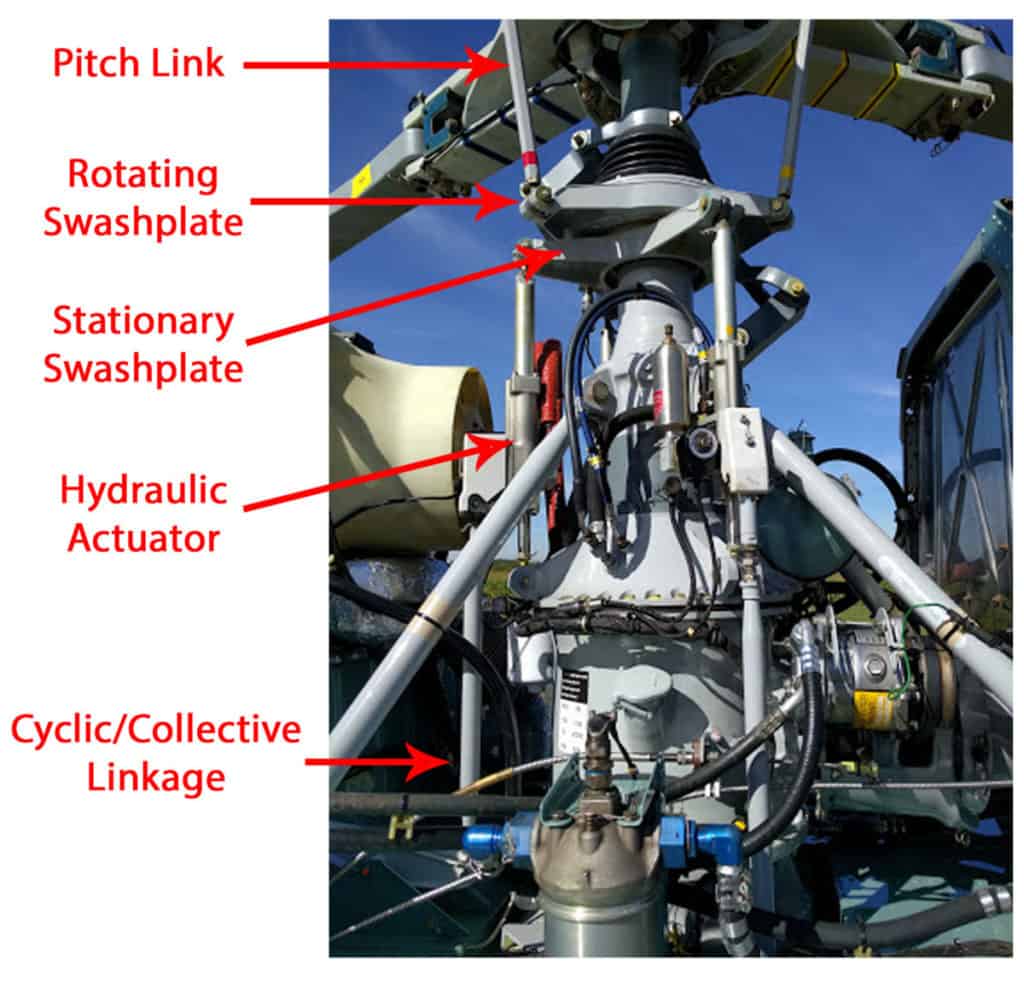
Flight Control Servos
These are the muscles of the helicopter! Hydraulic servos are what connect to the swashplates of the main and tail rotors to change the pitch of the blades.
Think of it like the power steering for your car. Larger helicopters require huge amounts of force to overcome the aerodynamic loads placed on the rotor blades and the only way to control the helicopter is to use hydraulic servos.
The push/pull flight control tubes that are linked to the pilot’s Cyclic, Collective & Pedals move pilot valves in the hydraulic system that tell the high-pressure hydraulic servos how to move.
Most helicopters have 3 hydraulic servos to move the main rotor swashplate and the larger helicopters usually have 6 – each servo doubled up for redundancy running of two separate hydraulic pressure systems.
The auto-hover system is connected in line with the push/pull tubes to move the pilot valves in the hydraulic servos. No matter if it’s the pilot or the actuators moving the push-pull/tube, the hydraulic servo knows no different. Whenever the tube moves the pilot valve, the hydraulic servo moves.
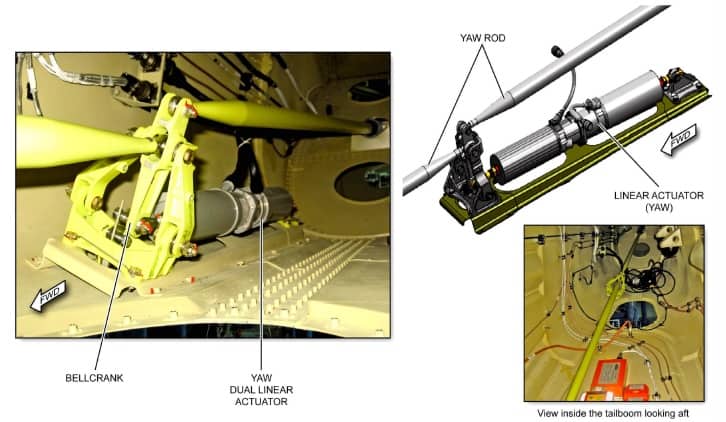
Here you can see how the linear actuator is installed in line with the Yaw push/pull tube. The push/pull tube disappearing off into the distance connects to the hydraulic pilot valve of the Yaw Servo.
To Finish
The larger, twin-engine helicopters are the helicopters that possess the technology to auto-hover. Multiple systems, both electronic and hydraulic allow the helicopter to be able to hold its position without too much difficulty.
The systems and helicopters are not cheap but the job they do to assist pilots when flying in tough weather conditions makes them an indispensable asset.
Having flown the AW139 and tested its Auto Hover performance I can say that it works well but still cannot match the handling abilities of a human pilot, but I’m sure it will not be long, if not already, before the auto hover system will outperform the human.
Further Reading
If you found this article interesting and would like to keep reading, I highly recommend the following articles from my blog:
- How Do Helicopter Controls Work? Pilot Tells All!
- How Do Helicopters Turn? Easy Yet Complex!
- How Much Can a Helicopter Lift? 20 Helicopters Compared!
- What Is A Helicopter Blade Made of? It Used To Be Wood!
- This is Why Helicopters Have Different Numbers of Rotor Blades?
